Одним из наиболее часто предлагаемых вариантов использования крошечных роботов является поиск выживших, оказавшихся в ловушке среди завалов места катастрофы. Робот CLARI, вдохновленный насекомыми, может быть особенно хорош в этом благодаря способности становиться тоньше, чтобы протискиваться через узкие горизонтальные зазоры.
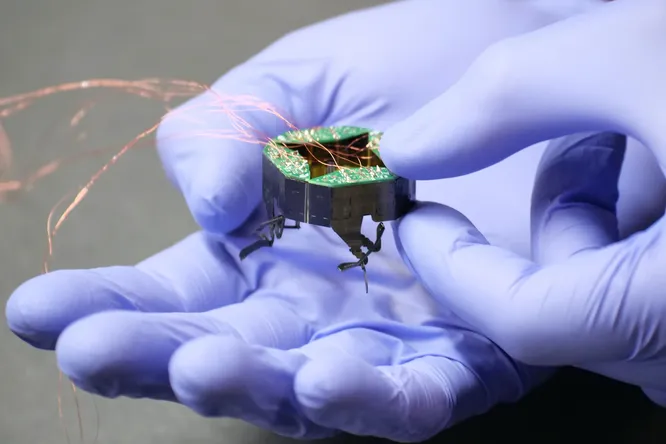
Название робота является аббревиатурой от «Послушное сочлененное роботизированное насекомое с ногами (англ. Compliant Legged Articulated Robotic Insect)». CLARI был создан в Университете Колорадо в Боулдере командой под руководством докторанта технических наук Хейко Кабуца. Он сотрудничал с профессором Каушиком Джаярамом, который ранее создал робота, напоминающего таракана и также способного сплющиваться, чтобы протиснуться через вертикальные щели.
Четвероногое тело CLARI размером примерно со спичечный коробок. Оно состоит из четырех секций, соединенных друг с другом гибкой внешней оболочкой робота. Каждая секция включает в себя одну ногу, а также собственную печатную плату и двойные приводы, которые перемещают конечность вперед и назад, а также из стороны в сторону. Это означает, что каждая нога может работать независимо от других.
При движении по открытой местности CLARI сохраняет квадратную форму по умолчанию, что обеспечивает оптимальную скорость и устойчивость. Однако если он сталкивается с пропастью, которая слишком узка, чтобы пройти через него в такой форме, робот может сменить конфигурацию, став более длинным и узким.
Хотя текущая версия CLARI жестко подключена к источнику питания и управления, есть надежда, что ее потомки будут питаться от батарей и будут оснащены датчиками, которые позволят им автономно преодолевать сложный рельеф. Ученые также хотят сделать этих роботов меньше, но при этом оснастить их большим количеством ног для повышения маневренности.