Ученые из MIT представили модель, которая генерирует наилучшие формы роботов, основываясь на деталях и местности, где они будут использоваться. Устройства получаются очень необычными, но хорошо справляются с перемещениями.
Исследователи из MIT представили способ, с помощью которого модель может автоматически сгенерировать роботизированный корпус. Она основывается на имеющихся деталях и рельфе местности, на котором будет работать устройство. Система также понимает, какие препятствия нужно преодолевать роботу. Ведущий автор статьи, Аллан Чжао, сообщил MIT News, что, несмотря на разнообразие задач, для которых используются роботы, их конструкции, как правило, все очень похожи по форме или дизайну.
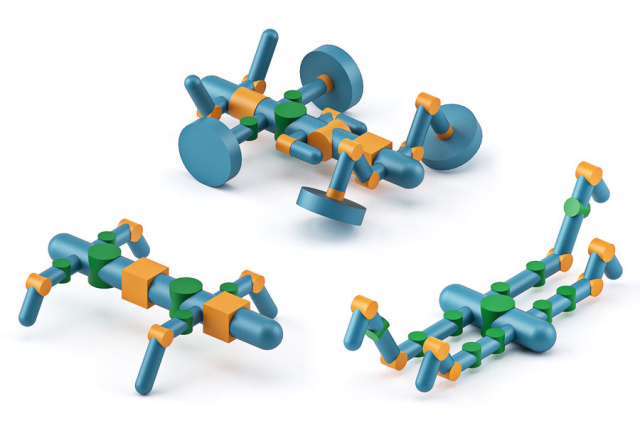
Роботы часто имитируют тела людей, животных или транспортных средств, с колесами и гусеницами для перемещения. Но исследователи отмечают, что это не всегда самая полезная и эффективная форма. Поэтому единственные ограничения модели RoboGrammar — это практические, связанные со строительством роботов. Например, в одной из симуляций, где рельеф местности был шероховатым с большим количеством поворотов, дизайн робота больше похож на крокодила, при этом в симуляции устройство действительно хорошо справлялось с перемещениями.
Пока система не может создавать роботов без участия человека. Но исследователи отмечают, что это первый шаг на пути к тому, чтобы сделать устройства эффективнее. Следующий шаг команды — представить первые прототипы и испытать их в реальной жизни. Ученые добавили, что система может принести пользу как инженерам, так и разработчикам сгенерированных видеоигр, которым необходимо быстро и эффективно создавать многолюдные среды.